Reference Frames¶
This page describes the \((x,y,z)\) reference frame used for most of kOS’s vectors. kOS inherits its reference frame mostly from the base Kerbal Space Program game itself. The coordinate system of Kerbal Space Program does some strange things that don’t make a lot of sense at first.
Note
Be aware that Kerbal Space program (and in fact many of the games based on the Unity game engine) uses a LEFT-handed coordinate system. kOS inherits this behavior from KSP.
In all the reference frames mentioned below, the orientation of the axes is left-handed. What does that mean? If you open your left palm and point your fingers along the x-axis, then curl your fingers in the direction of the y-axis and stick out your thumb, your thumb will be pointing along the z-axis. (If you do those steps with your right hand, you will get a z-axis in the opposite direction and that is known as a right handed coordinate system).
This is an important thing to keep in mind, as most mathematics and physics textbooks tend to draw examples using a right handed coordinate system, and most students become familiar with that convention first. But for a variety of reasons, many computer graphics systems have a tradition of using left-handed systems instead, and Kerbal Space Program is one of them.
- SHIP-RAW
The name of the reference frame in which the origin point is CPU Vessel (SHIP), and the rotation is identical to KSP’s native raw coordinate grid.
- SOI-RAW
The name of the reference frame in which the origin point is the center of the SOI body, and the rotation is identical to KSP’s native raw coordinate grid.
- RAW-RAW
The name of the reference frame in which both the origin point and the rotation of the axes is identical to KSP’s native raw coordinate grid. This is never exposed to the KerbalScript program, because the origin point is meaningless to work with.
Note
It is hoped that this may be expanded in the future, and conversion routines provided to let people pick a reference frame that makes sense depending on what the script is trying to do. At the moment the only reference frames used are SHIP-RAW and SOI-RAW, as they match closely to what KSP is using internally.
Raw Orientation¶
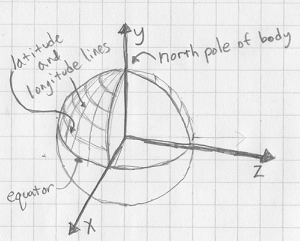
The Y axis of KSP is the only consistent thing. Imagine a ray starting in the center of the SOI body and pointing upward out through the north pole. That is the direction of the Y axis. (If you move to the SOI of a body with an inclined spin, presumably it will also change the angle of the Y axis to point in the new direction of the body’s spin axis).
The X and Z axes of the coordinate grid are then consequently aligned with the equator plane of the SOI body, 90 degrees to each other. KSP uses a left-handed coordinate system, so the Z axis will always be rotated 90 degrees to the east of the X axis.
However, it’s hard to predict exactly where the X and Z axes will be. They keep moving depending on where you are, to the point where it’s impossible to get a fix on just which direction they’ll point.
Origin Position¶
The origin position of the \((x,y,z)\) coordinate grid in KSP is also a bit messy. It’s usually near but not exactly on the current ship. kOS performs some conversions for you to make this a bit simpler and keep everything consistent.
Regardless of where the origin of the underlying KSP system is, in kOS, whenever a POSITION is reported, it will always be reported in a frame of reference where the origin is located at the CPU Vessel.
However, for the sake of VELOCITY, the origin point of all vectors is usually not SHIP, but the SOI body’s center. This is because if the origin point was the SHIP, then the ship’s velocity would always be zero in that frame of reference, and that would not be useful.
(The makers of kOS are aware that this is not technically a proper frame of reference, because the origin point varies depending on if you’re getting POSITION or getting VELOCITY. Fixing it at this point would break a lot of existing scripts, however.)
So the rule of thumb is:
For POSITION returned by KSP, the SHIP-RAW reference frame is used: centered on SHIP, with raw axes rotation.
For VELOCITY returned by KSP, the SOI-RAW reference frame is used: centered on SOI Body, with raw axes rotation.
Converting¶
Converting between SHIP-RAW and SOI-RAW reference frames is a simple matter of moving the origin point by adding or subtracting the SHIP:BODY:POSITION vector from the coordinate. This works because both frames are using the same axes rotation.
Any SHIP-RAW position vector minus
SHIP:BODY:POSITIONGives the vector in SOI-RAW coordinates.Any SOI-RAW position vector plus
SHIP:BODY:POSITIONGives the vector in SHIP-RAW coordinates.